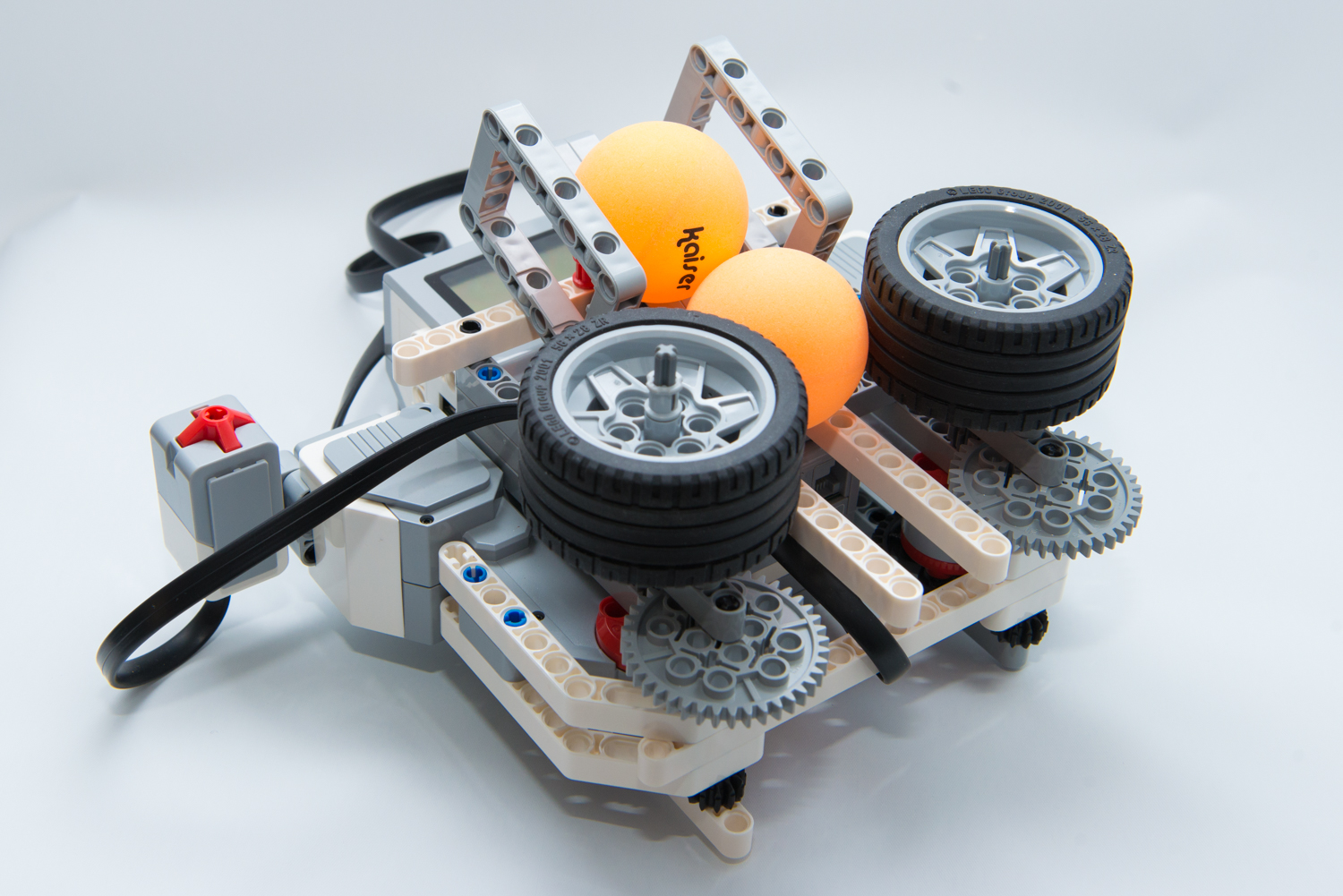
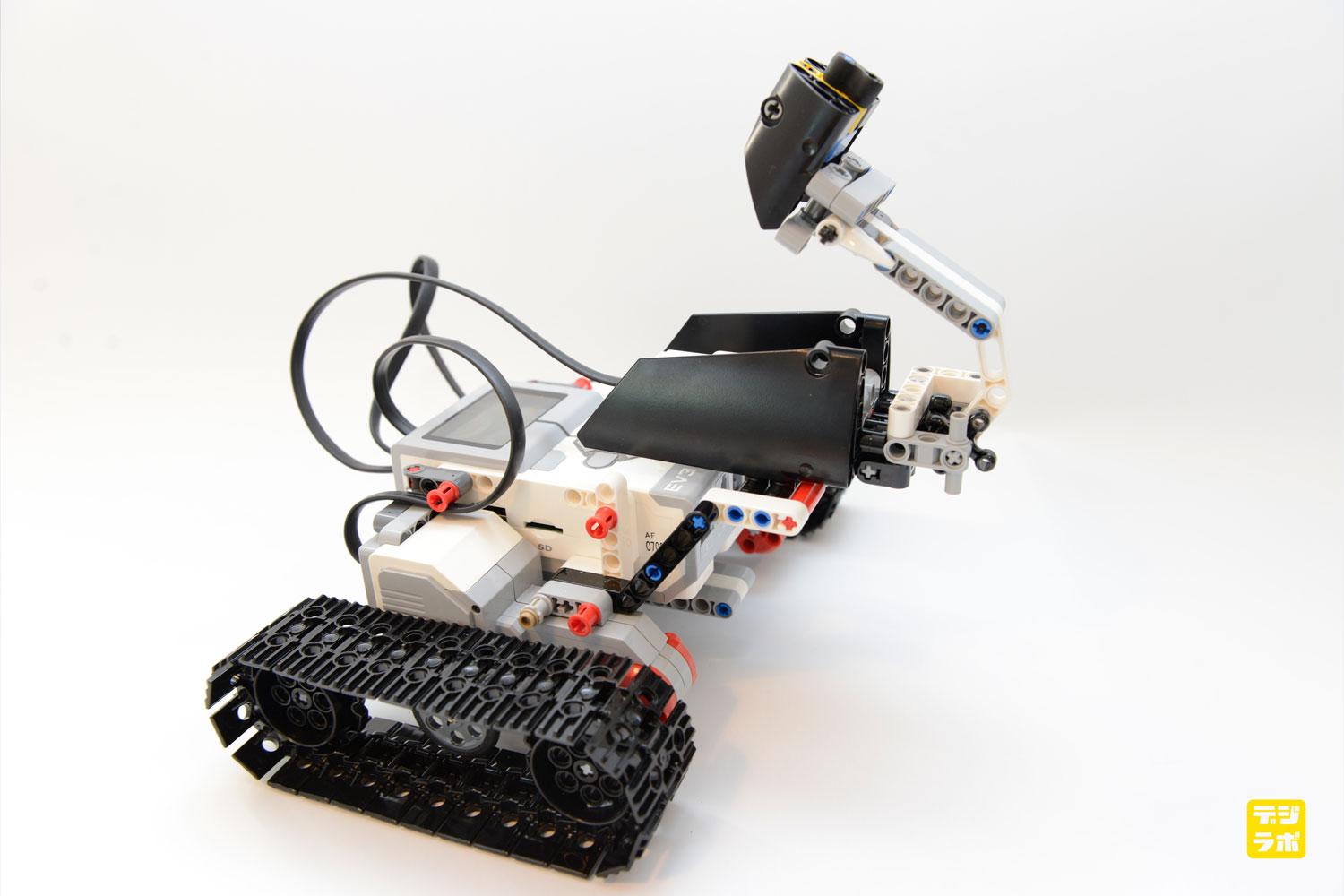
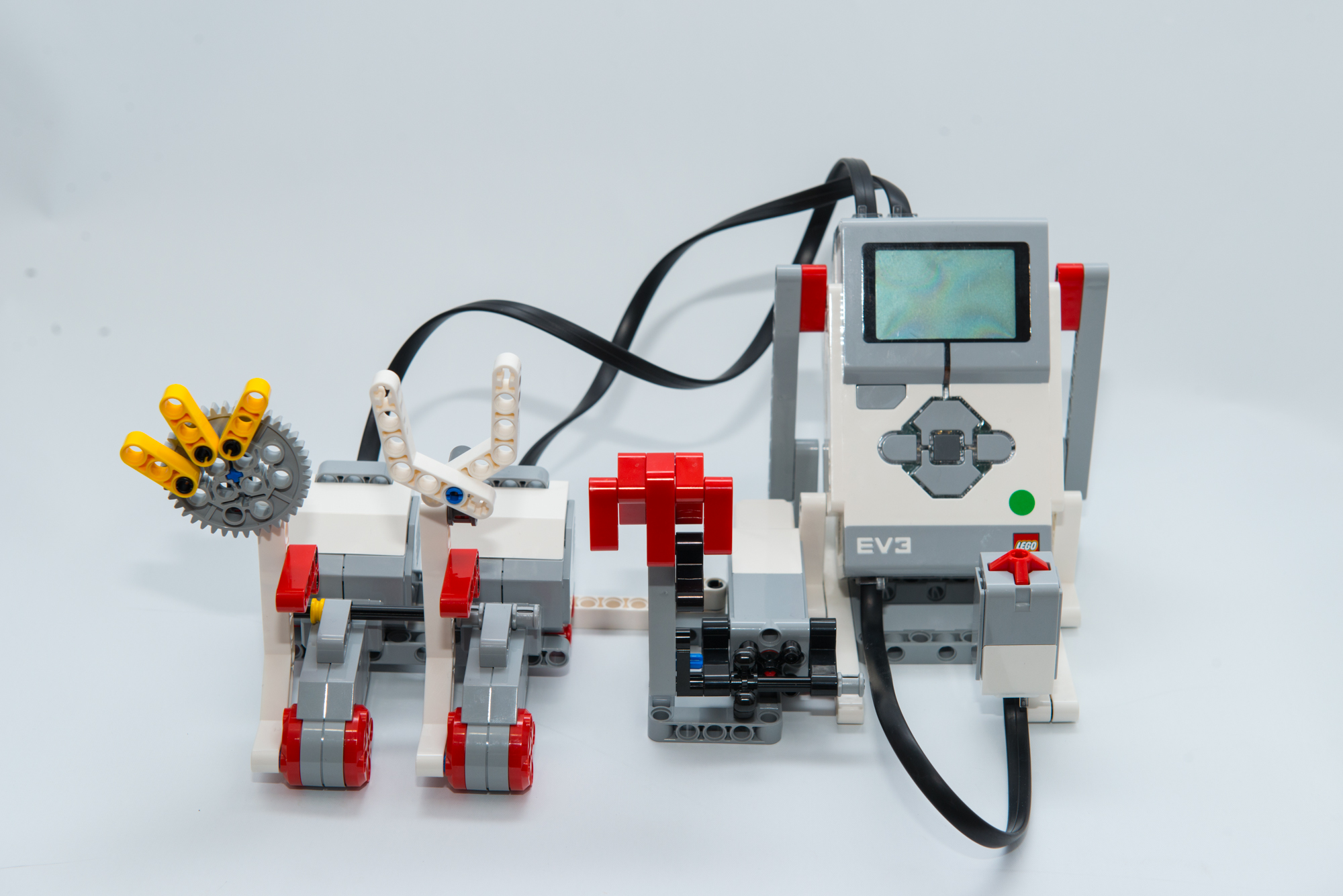
ピッチングロボットを
ボールを
1.
2.
3.
4.
5.

6.
7.
8.
9.
10.
11.
12.
13.
14.
15.

16.
17.
18.
19.
20.
21.
22.
23.
24.
25.

26.
27.
28.
29.
30.
31.
32.
33.

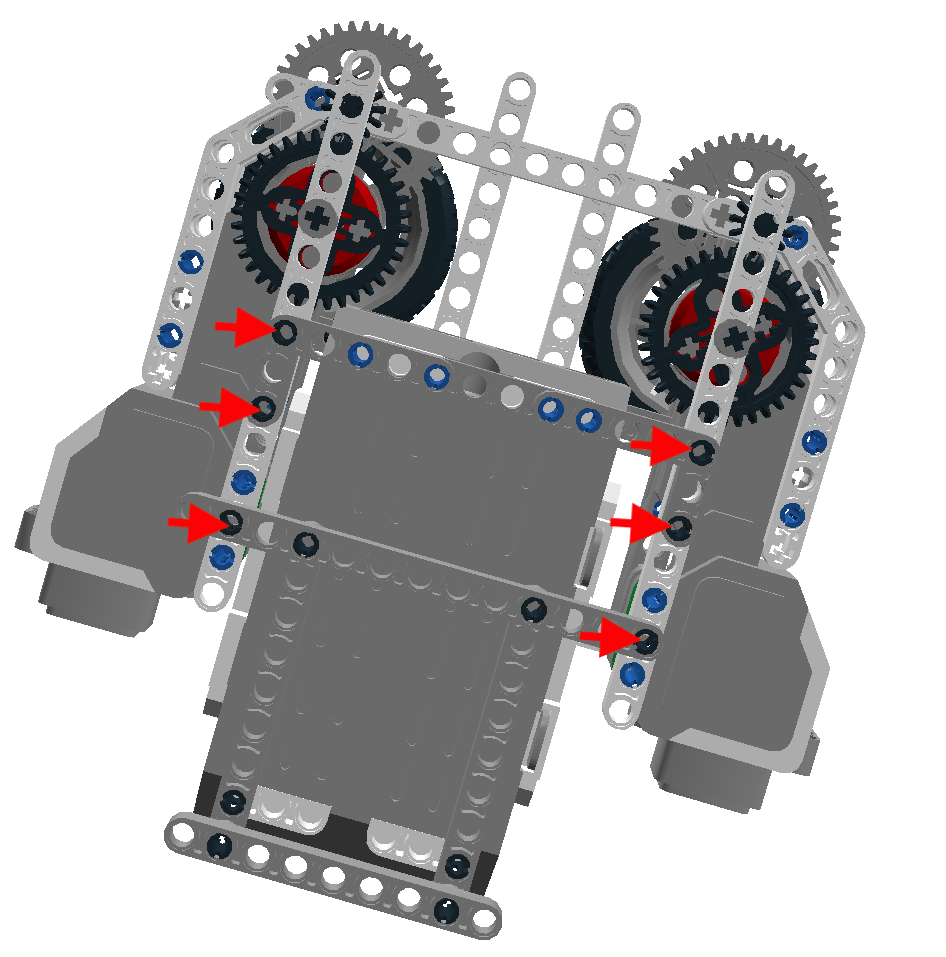
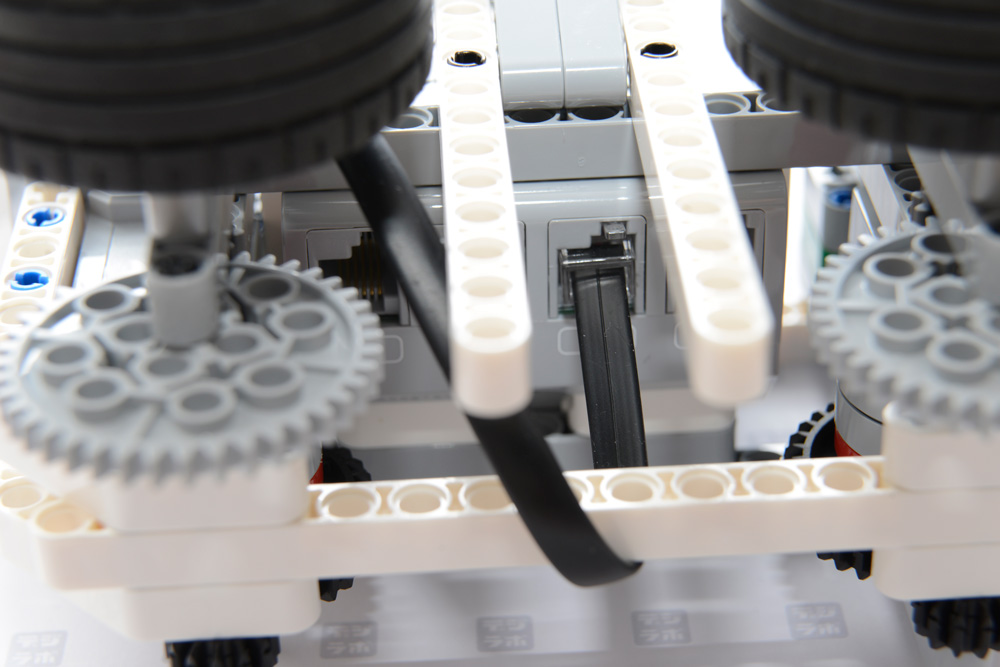
34.ゲーブルがタイヤに当たらないように配線する!!
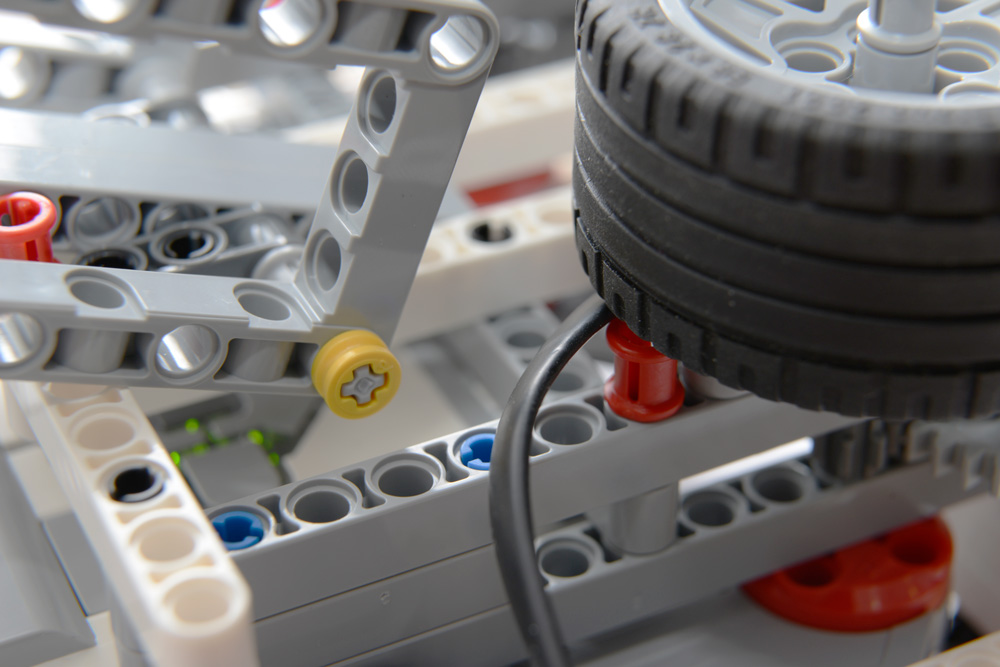
35.ゲーブルがタイヤに当たると、ゲーブルが削れてしまうぞ。
プログラミング
LV.1 スイッチを
※
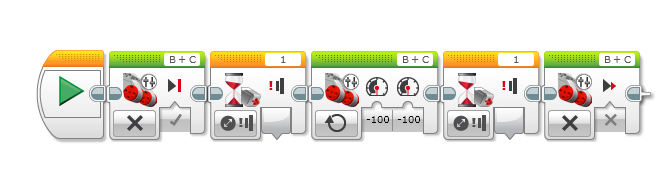
LV.2 スイッチを押 したときだけ動 く

LV.3 スイッチを
ループと
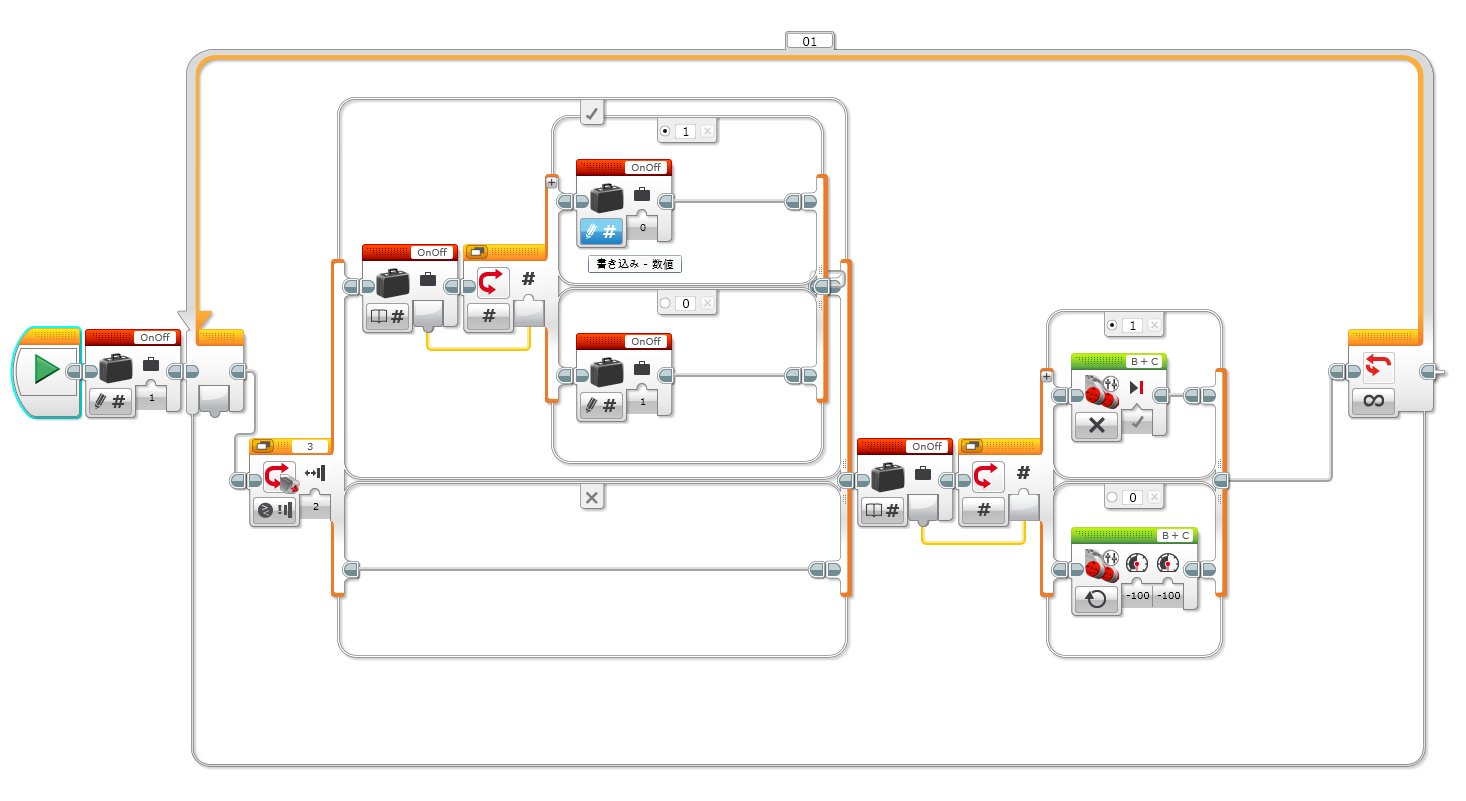
LV.3.5 スイッチを
EV3はとても優れたロボットツールなのでマルチタスクプログラミングをすることができます。上のプログラミングをマルチタスク化すると以下のようにわけられます。

開始ボタンでマルチスレッド化した場合は開始ブロックではなく、右下の開始ボタンをクリックする。



{kind=link}