1. 前面のタッチセンサーを付
けよう
今回は、詳しい説明書を見て作るのではなく、要所要所の構造をみて考えながら作ってみよう!!
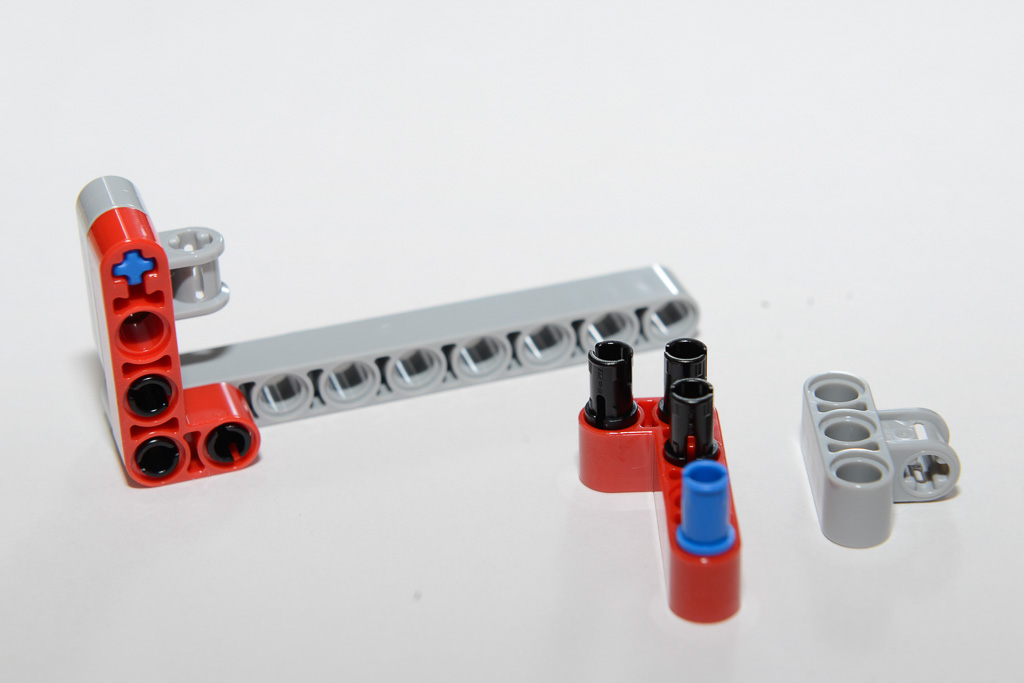
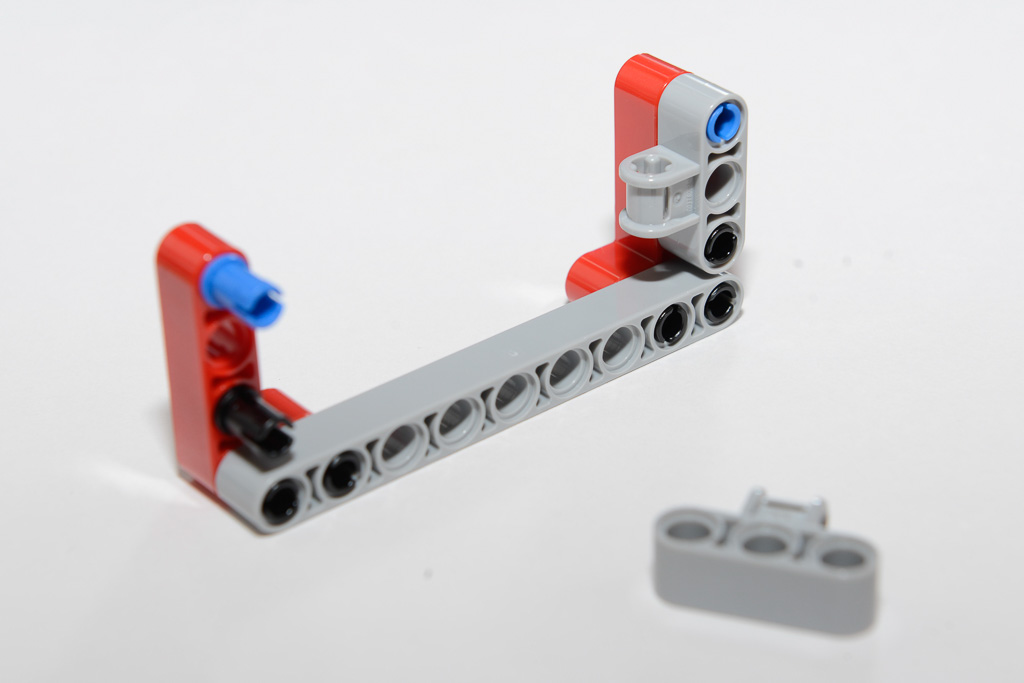
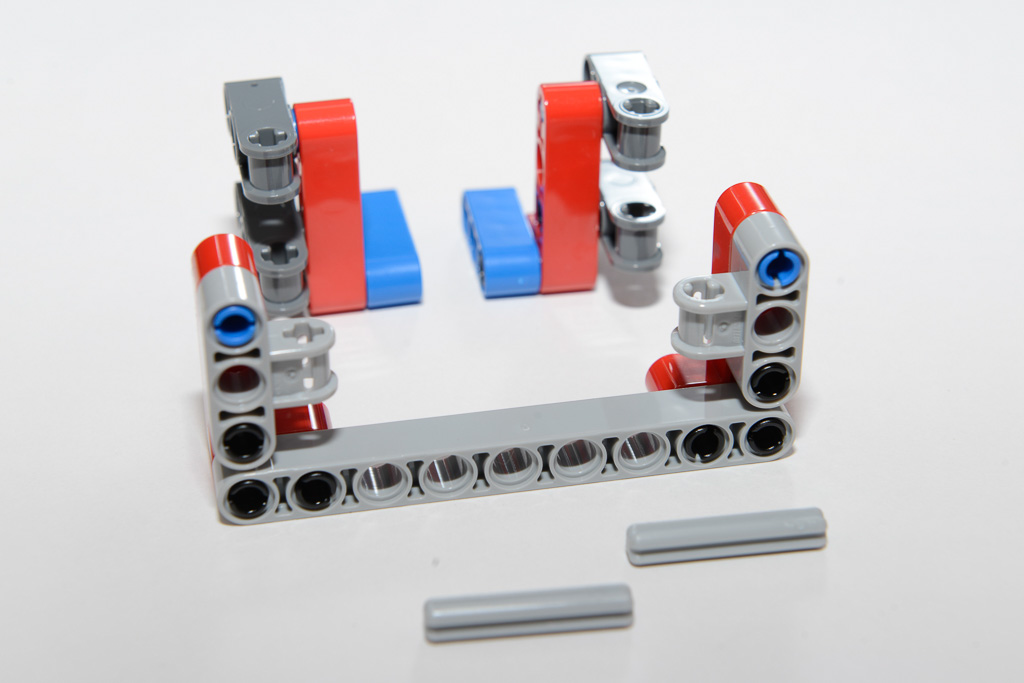
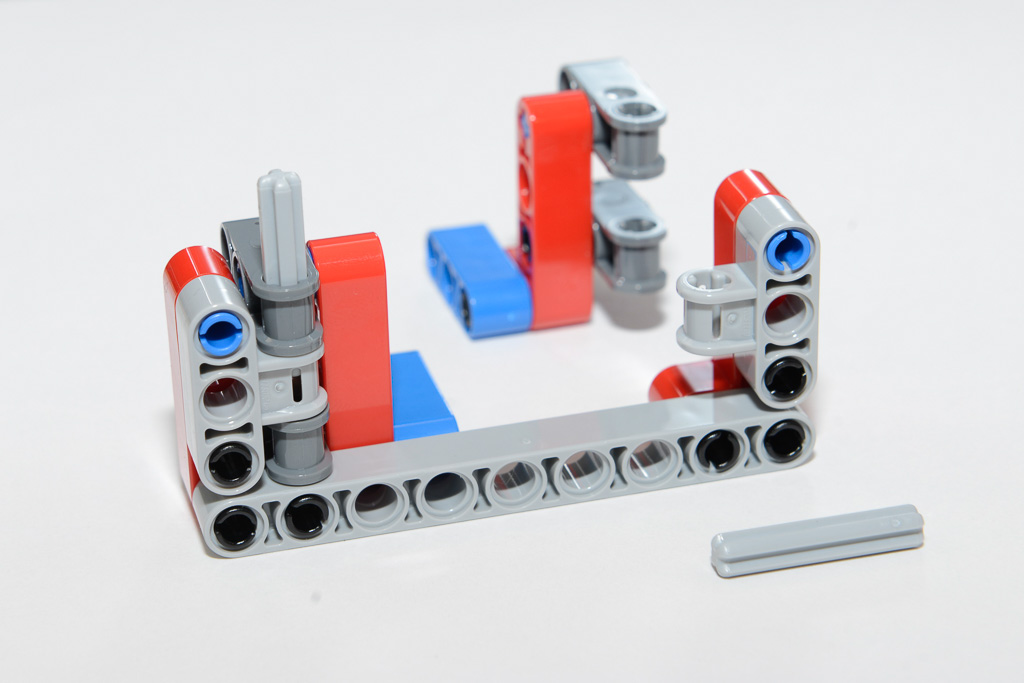
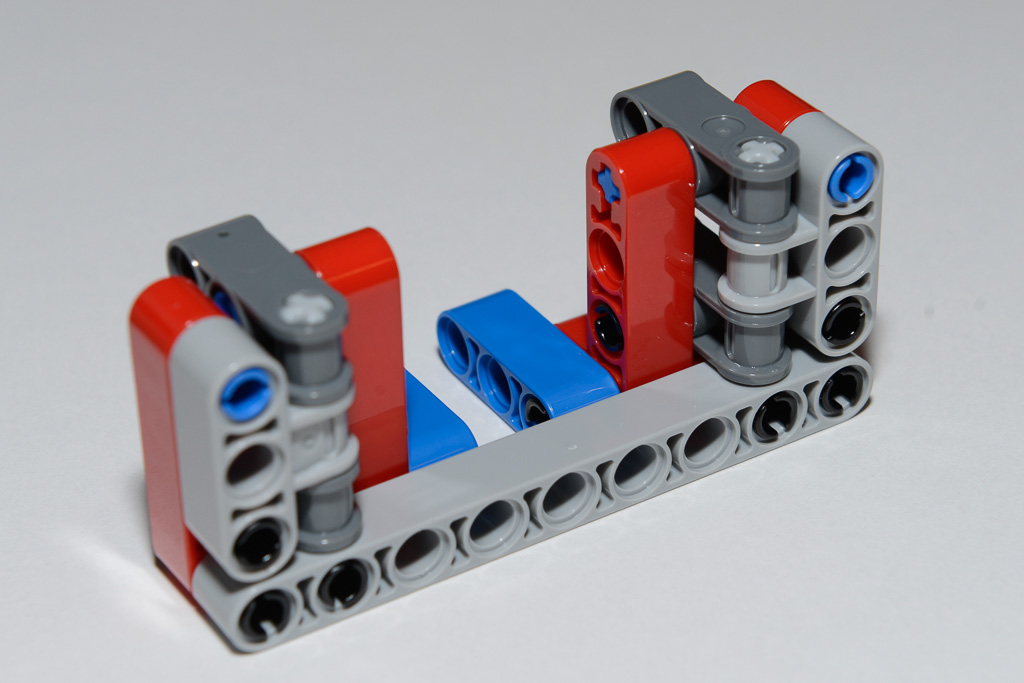
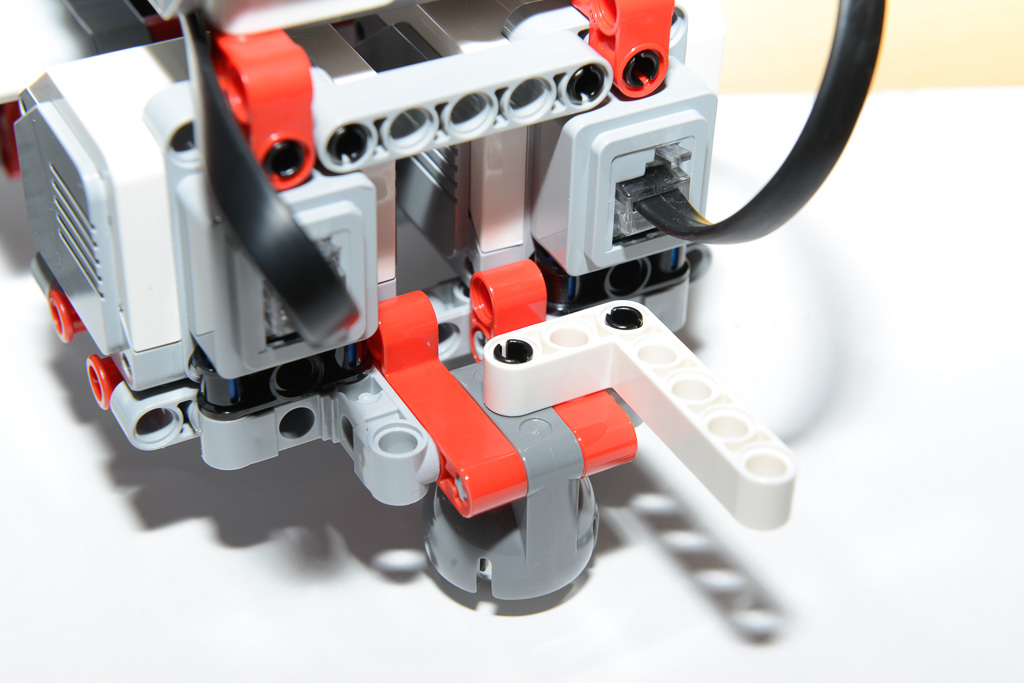
バンパーを作る
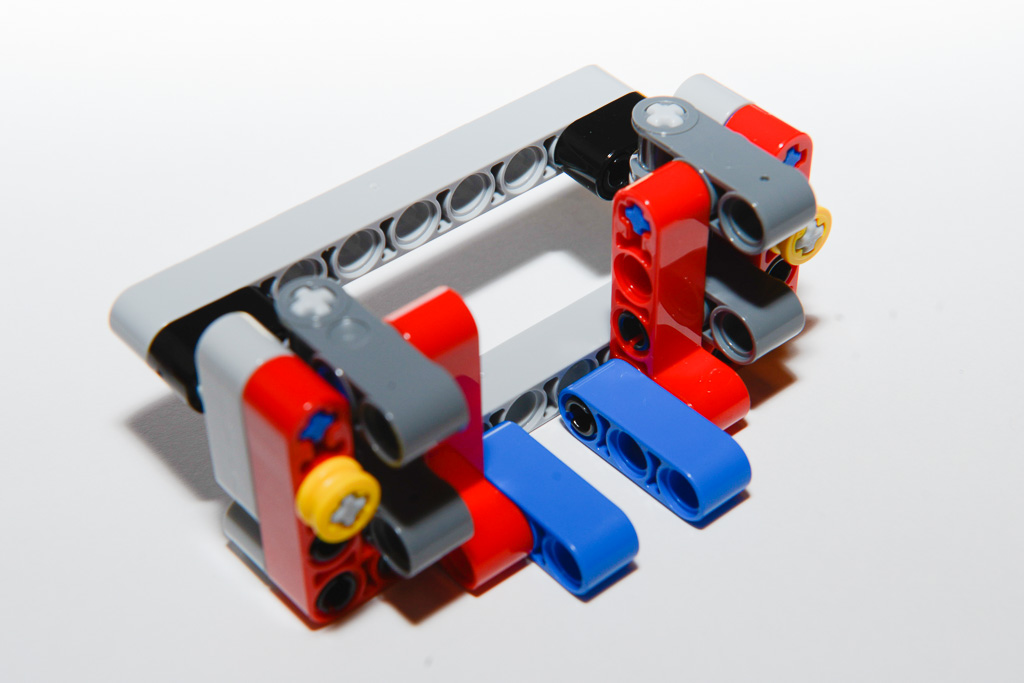
1. バンパー部分
を作る。(あとでつかいます)
を作る。(あとでつかいます)

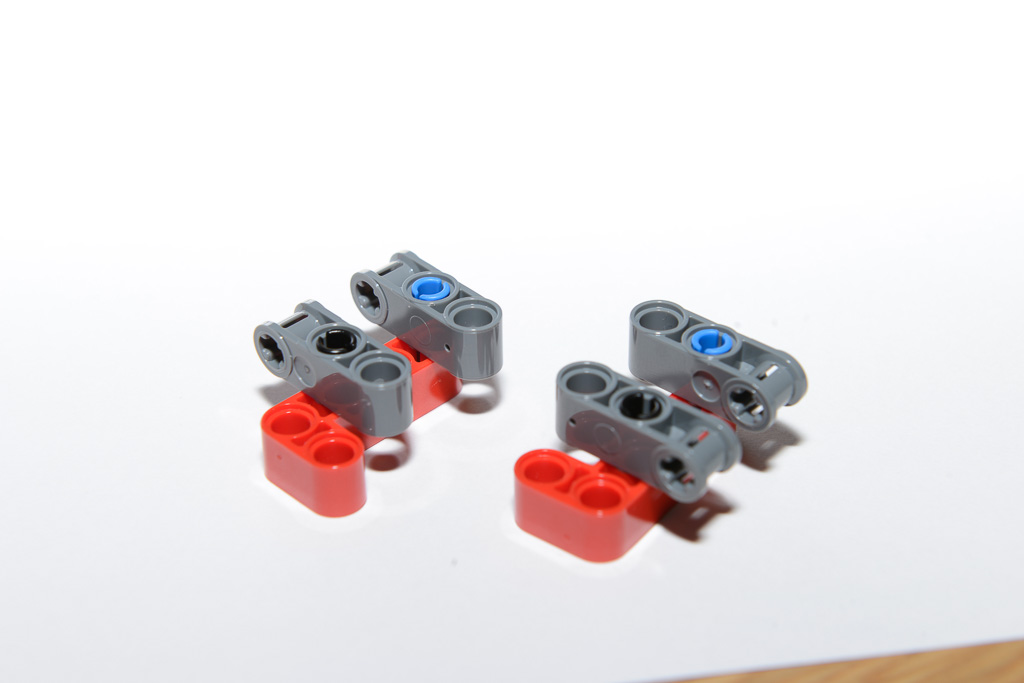
2.

3.
4.
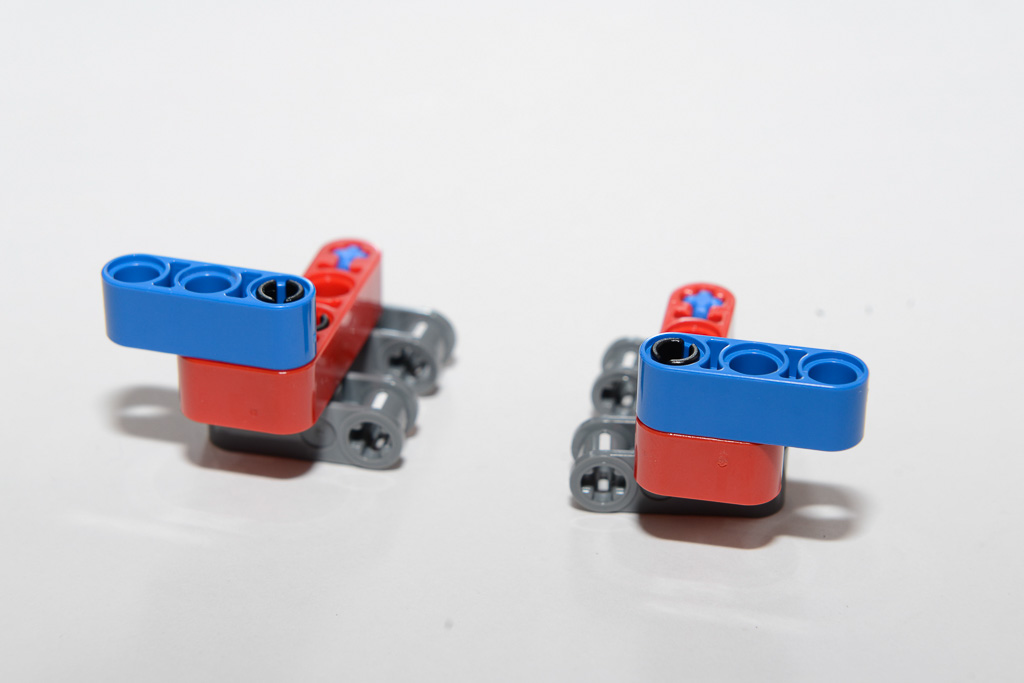
5.
6.
7.

8.
9.
10.
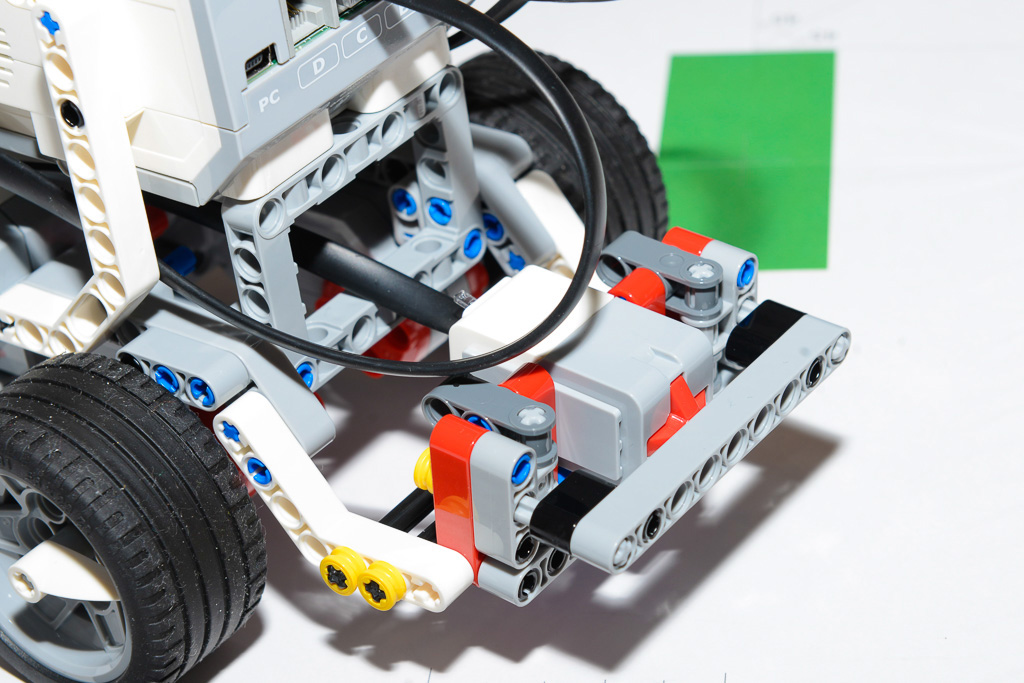
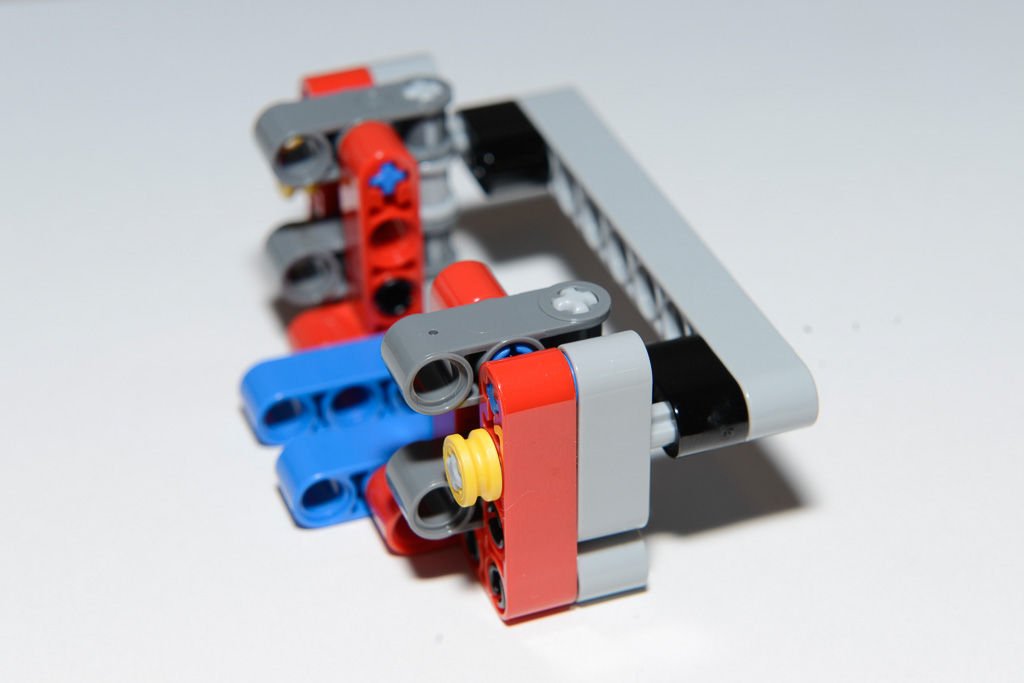
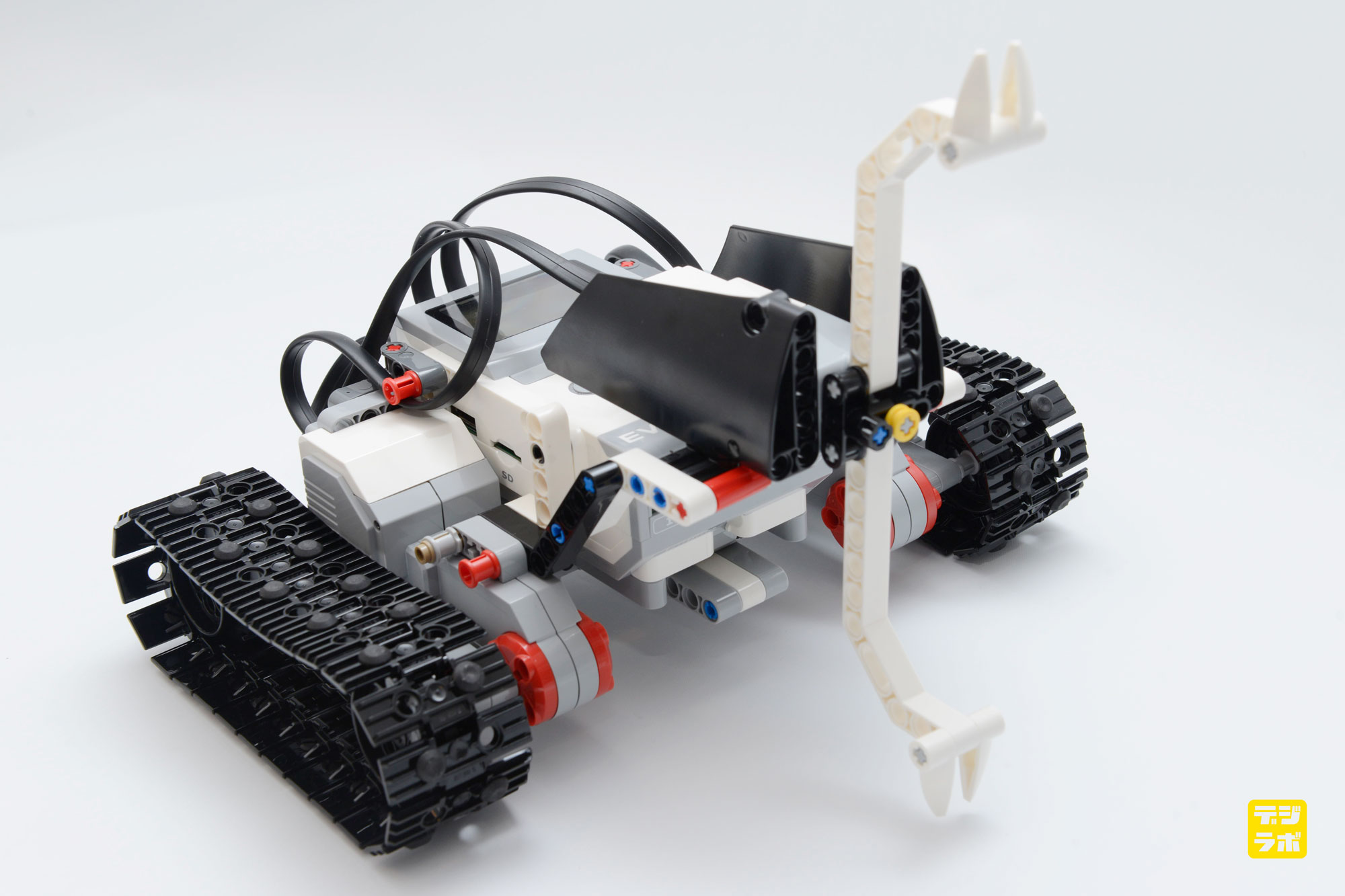
11. バンパーを取り付けます。
12. バンパーと本体
に間
をあける
14.

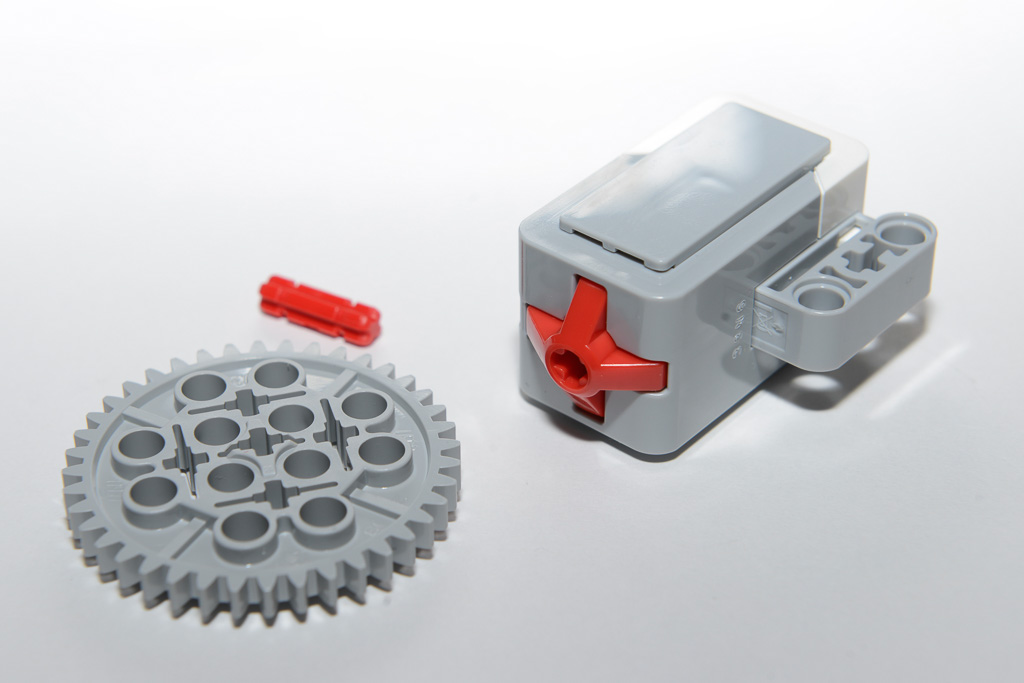
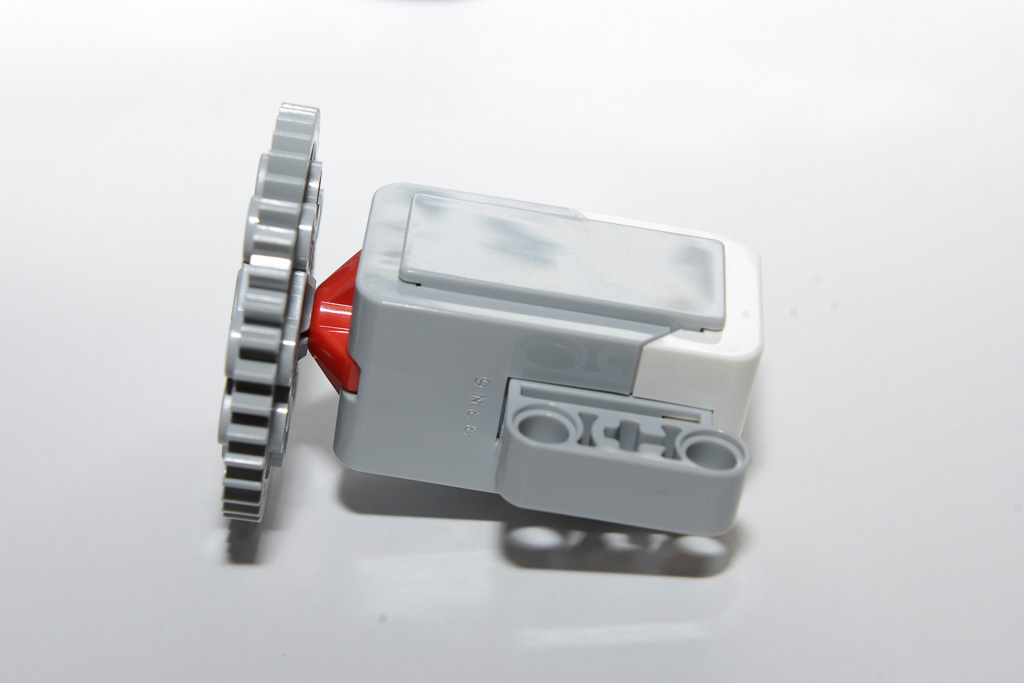
13. スイッチセンサー、バンパーユニットをベースロボットを同時
に固定
します

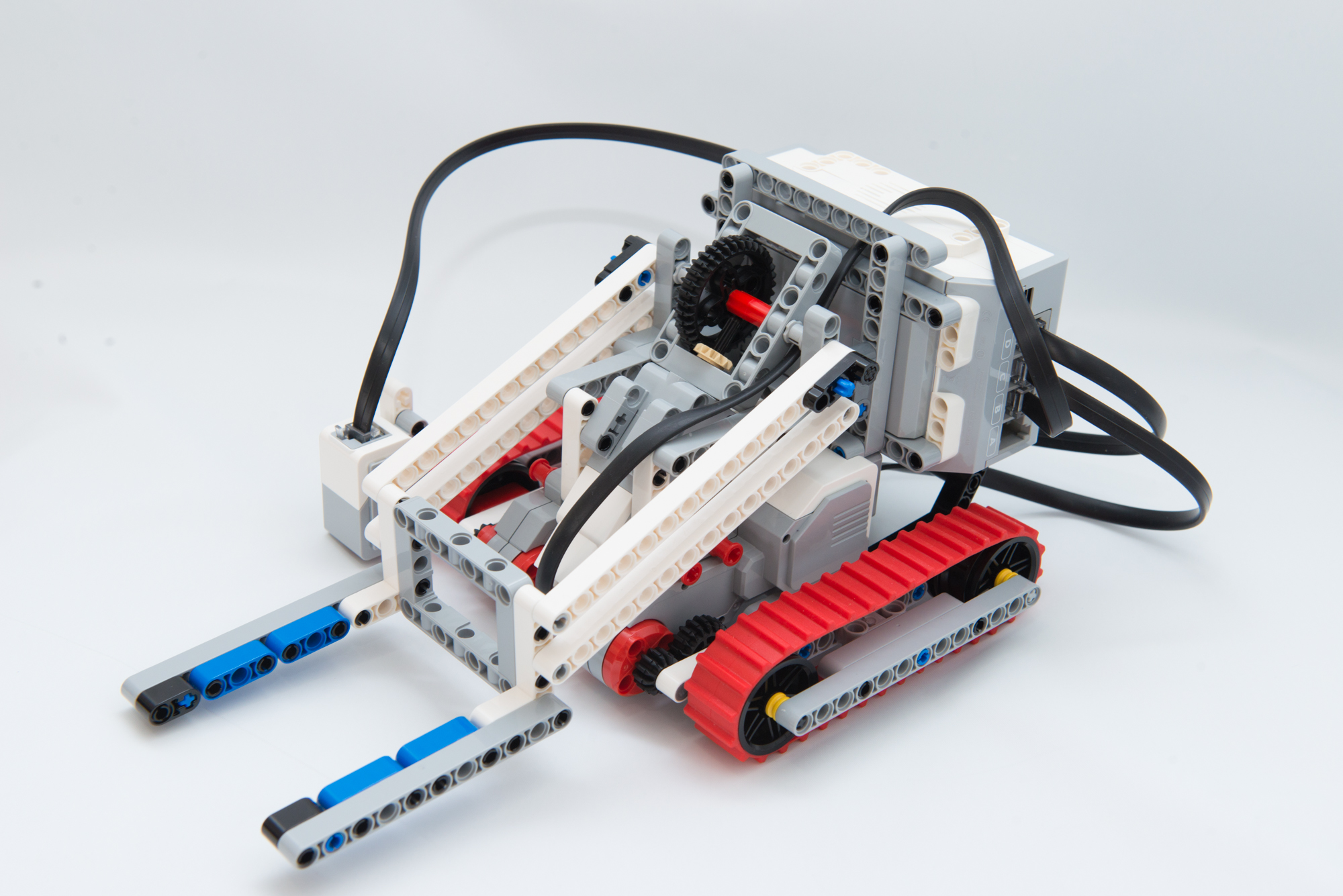
1. 後ろのタッチセンサーを付けよう
前面より簡単な構造だから頑張ろう!!

後部タッチセンサー部分を作る
1.
2.
3.

4 .
5 .

3. プログラムを書こう!!
今回のプログラムは、後ろのセンサーが押されたらロボットが走り出し、前面のセンサーが押されたら止まる単純なプログラムだ。



![[Unity]ビジュアルスクリプト – クリックしたオブジェクトを取得する](https://digilab.tech/materials/wp-content/uploads/2024/03/スクリーンショット-2024-03-15-134311-150x150.png)
![[Unity] Visual Scripting でつくる簡単ゲーム「プラットフォームゲーム」](https://digilab.tech/materials/wp-content/uploads/2024/03/サムネ_オブジェクトのdestroy-150x150.jpg)
![[Unity] Visual Scripting でつくる簡単ゲーム「防空ゲーム」その2](https://digilab.tech/materials/wp-content/uploads/2024/02/サムネ_オブジェクトのAirDefenceNo2-150x150.jpg)
![[Unity] Visual Scripting でつくる簡単ゲーム「防空ゲーム」その1](https://digilab.tech/materials/wp-content/uploads/2024/02/サムネ_オブジェクトのAirDefenceNo1-150x150.jpg)

{kind=link}