1.
2.
3.

4.
5.
6.
7.

8.
9.
10.

11.
12.
13.
14.
15.
16.
17.
18.
19.


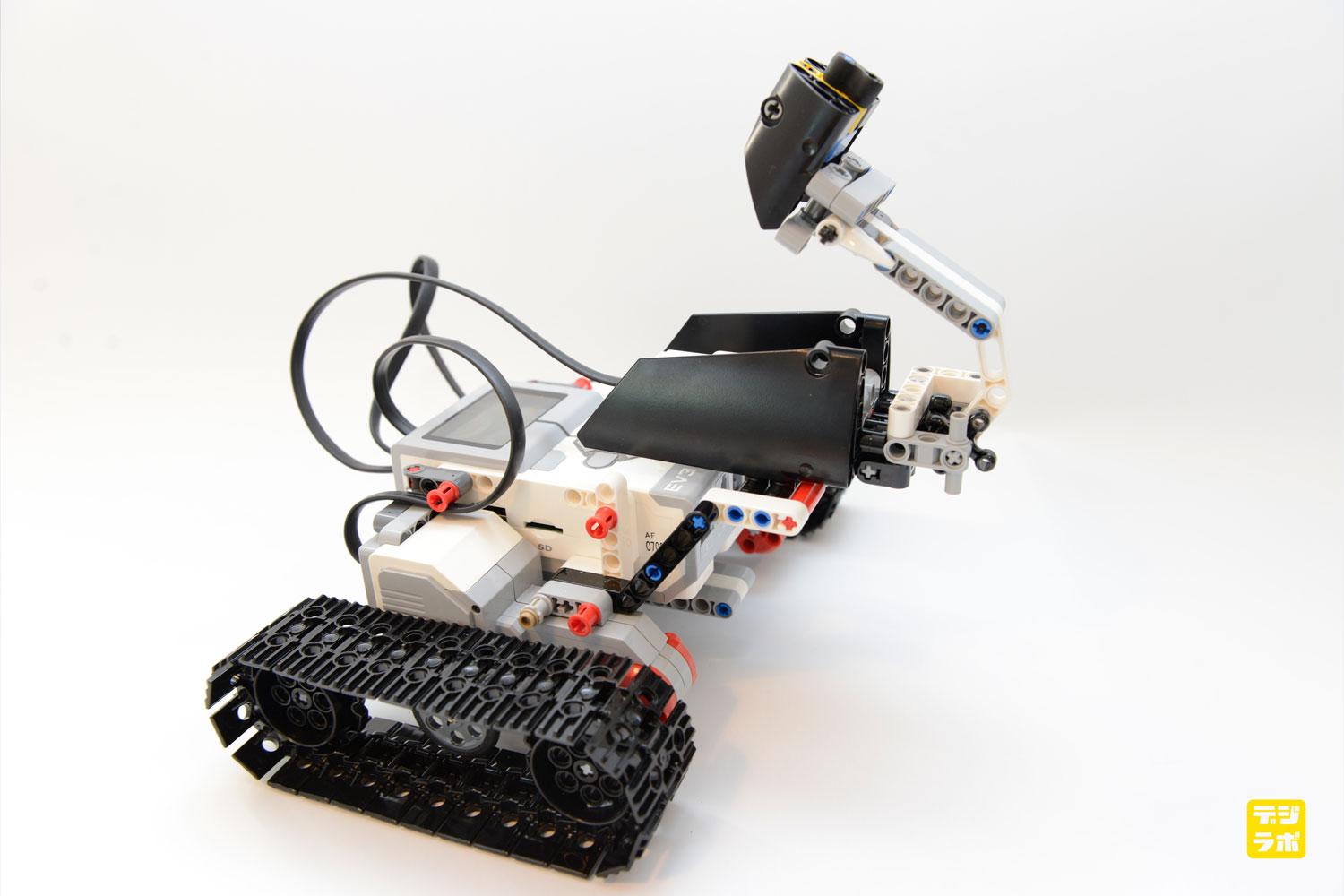
【迎撃ロボット】
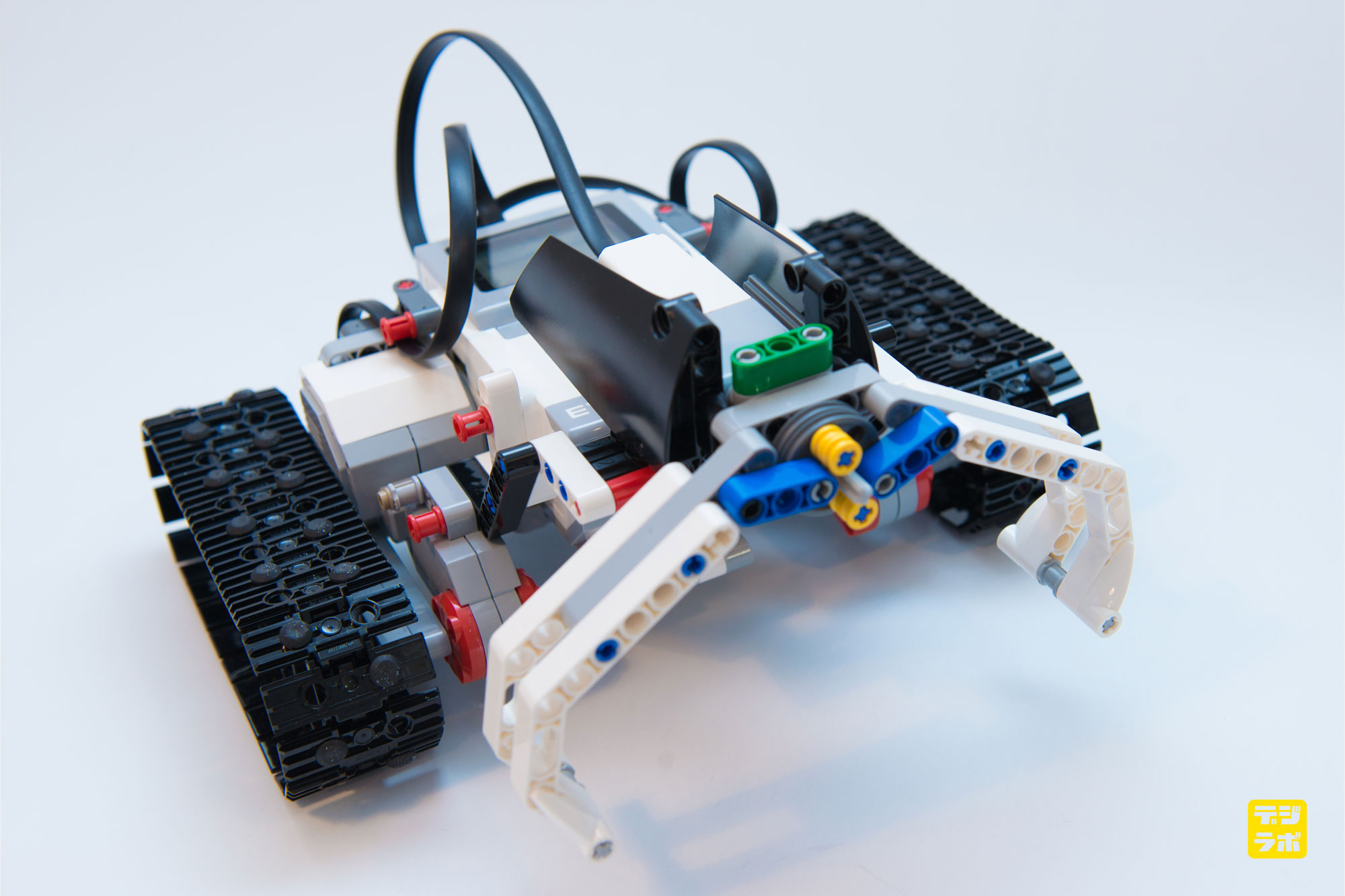
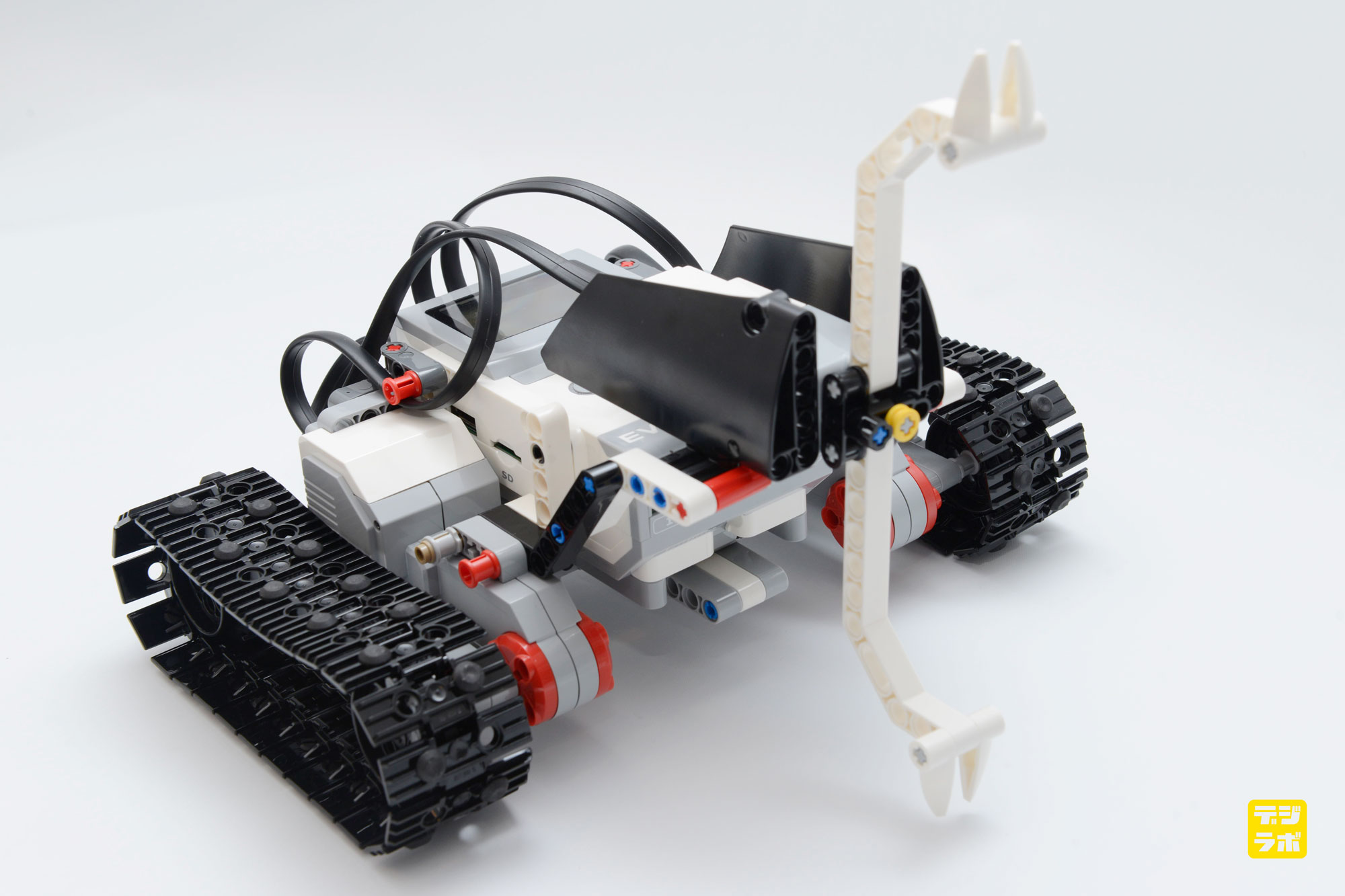
1.ロボットの後部に距離センサーを付けよう!! 後ろに近づいた敵(人など)を感知できるように取り付けよう。
2.センサーを検知したら180度旋回してハンマーを振り下ろしてみよう。
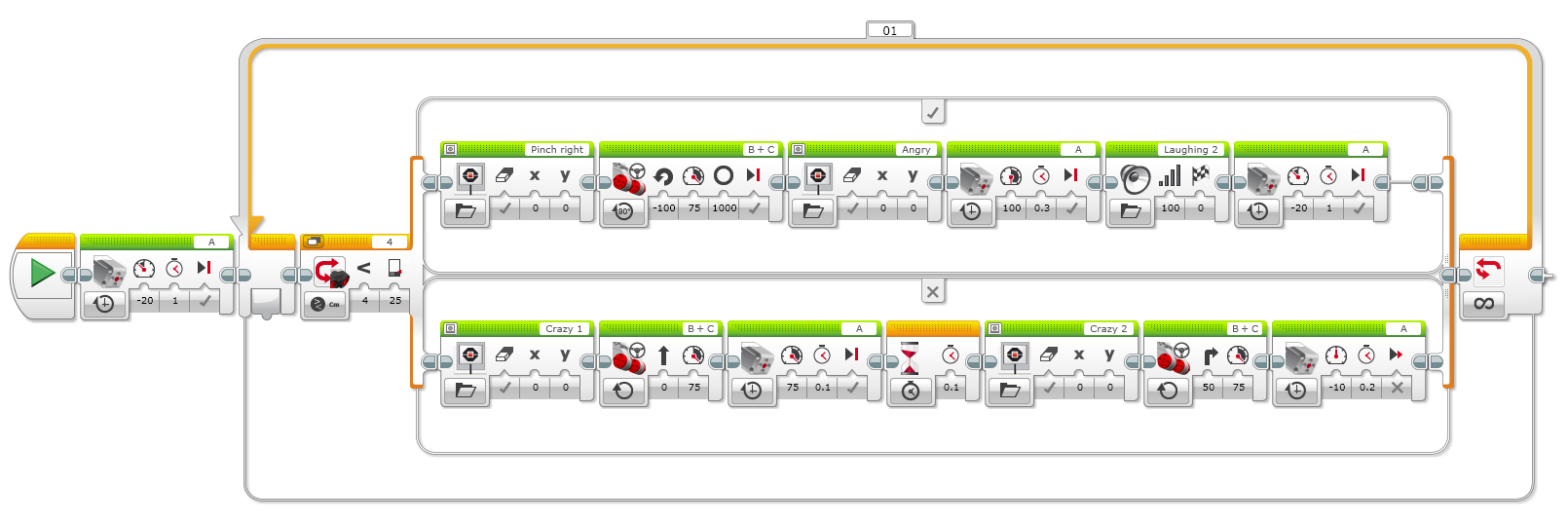
プログラミングをしてみよう。
下のプログラムはセンサーで物体を感知すると、ロボットを180度回転させてハンマーを下ろすようになっている。
プログラミングをして動かしてみよう、もし正しい動きをしない場合は、プログラムを修正してみよう。
下のプログラムはセンサーで物体を感知すると、ロボットを180度回転させてハンマーを下ろすようになっている。
プログラミングをして動かしてみよう、もし正しい動きをしない場合は、プログラムを修正してみよう。
![スイッチセンサーを使う[LV1] LEGO EV3](https://digilab.tech/materials/wp-content/uploads/2017/10/D802679.jpg)


![[Unity]ビジュアルスクリプト – クリックしたオブジェクトを取得する](https://digilab.tech/materials/wp-content/uploads/2024/03/スクリーンショット-2024-03-15-134311-150x150.png)
![[Unity] Visual Scripting でつくる簡単ゲーム「プラットフォームゲーム」](https://digilab.tech/materials/wp-content/uploads/2024/03/サムネ_オブジェクトのdestroy-150x150.jpg)
![[Unity] Visual Scripting でつくる簡単ゲーム「防空ゲーム」その2](https://digilab.tech/materials/wp-content/uploads/2024/02/サムネ_オブジェクトのAirDefenceNo2-150x150.jpg)
![[Unity] Visual Scripting でつくる簡単ゲーム「防空ゲーム」その1](https://digilab.tech/materials/wp-content/uploads/2024/02/サムネ_オブジェクトのAirDefenceNo1-150x150.jpg)

{kind=link}